About

PhD Candidate in Artificial Intelligence
I am a Ph.D. Candidate at AI Graduate School, GIST, advised by Prof. Hae-Gon Jeon.
I received B.S. and M.S. degrees in EECS from DGIST and GIST in 2020 and 2021, respectively.
I had research internships at Carnegie Mellon University, working with Prof. Jean Oh at Bot Intelligence Group (BIG).
My research is focused on modeling the physical and social relations of humans.
- Institution: Gwangju Institute of Science and Technology
- Title: PhD Student
- Email: inhwanbae (at) gm.gist.ac.kr
- Office: 412, EECS Building C(C3)
- Website: ihbae.com
- GitHub: github.com/InhwanBae
- Google Scholar: Click Here
- Curriculum Vitae: Click Here
News
| Feb2024 | Two papers on language and diffusion models are accepted at CVPR 2024! |
| Jan2024 | One paper on unbounded NeRF is accepted at ICLR 2024! |
| Jul2023 | One paper on low-rank approximated trajectory descriptors is accepted at ICCV 2023! |
| Apr2023 | One paper on hyperbolic spatial propagation is accepted at ICML 2023! |
| Nov2022 | One paper on control point prediction and refinement network is accepted at AAAI 2023! |
| Sep2022 | Starting my internship at Bot Intelligence Group, The Robotics Institute, CMU. |
| Jul2022 | One paper on pedestrian group representation learning is accepted at ECCV 2022! |
| Mar2022 | One paper on non-probabilistic sampling network is accepted at CVPR 2022! |
| Sep2021 | Starting my PhD program at GIST AI Graduate School. |
| Feb2021 | Honored to receive 27th Samsung HumanTech Paper Award! |
| Dec2020 | One paper on disentangling and multi-relational GCN is accepted at AAAI 2021! |
| Mar2020 | Starting my Master's program at Gwangju Institute of Science and Technology. |
| May2019 | Starting my software engineering career at SONNET.ai. |
| Jun2019 | Starting my sponsored research career at Daedong Industrial Co., Ltd. |
| Jun2018 | Starting my internship at Departments of Information and Communication Engineering, DGIST. |
| Dec2017 | Starting my internship at Convergence Research Center for Future Automotive Technology, DGIST. |
Research Interests
My work explores the following areas, but not limited to.
Computer Vision
Lane Detection, Action and Behavior Recognition, Vehicle model & year classification
Skills
Resume
Education
Ph.D. in AI Graduate School
2021 - Present
Gwangju Institute of Science and Technology, South Korea
Advisor: Prof. Hae-Gon Jeon, GPA: 4.5/4.5 (100/100)
M.S. in Electrical Engineering and Computer Science
2020 - 2021
Gwangju Institute of Science and Technology, South Korea
Advisor: Prof. Hae-Gon Jeon, GPA: 4.2/4.5 (96/100)
B.E. in Convergence Engineering
2016 - 2020
Daegu Gyeongbuk Institute of Science and Technology, South Korea
Advisor: Prof. Gyeungho Choi and Prof. Yongseob Lim, GPA: 3.9/4.3 (95/100)
Research Experience
Visiting Researcher
2022
Carnegie Mellon University, The Robotics Institute, Pittsburgh PA, USA
Bot Intelligence Group, Advisor: Prof. Jean Oh
Research Intern
2017
Convergence Research Center for Future Automotive Technology, DGIST, South Korea
Publications
- All
- Conference
- Journal
- Patent
Can Language Beat Numerical Regression? Language-Based Multimodal Trajectory Prediction
Computer Vision and Pattern Recognition (CVPR) 2024
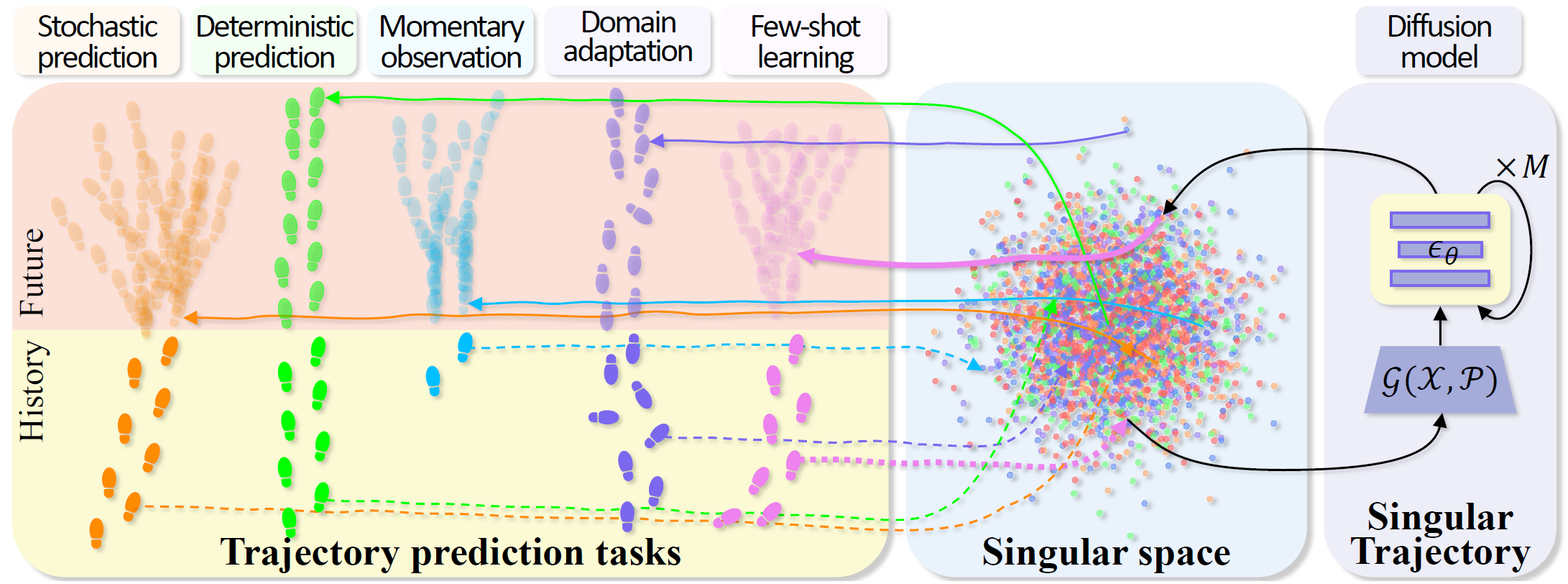
SingularTrajectory: Universal Trajectory Predictor using Diffusion Model
Computer Vision and Pattern Recognition (CVPR) 2024
EigenTrajectory: Low-Rank Descriptors for Multi-Modal Trajectory Forecasting
International Conference on Computer Vision (ICCV) 2023

Learning Pedestrian Group Representations for Multi-modal Trajectory Prediction
European Conference on Computer Vision (ECCV) 2022
Non-Probability Sampling Network for Stochastic Human Trajectory Prediction
Computer Vision and Pattern Recognition (CVPR) 2022

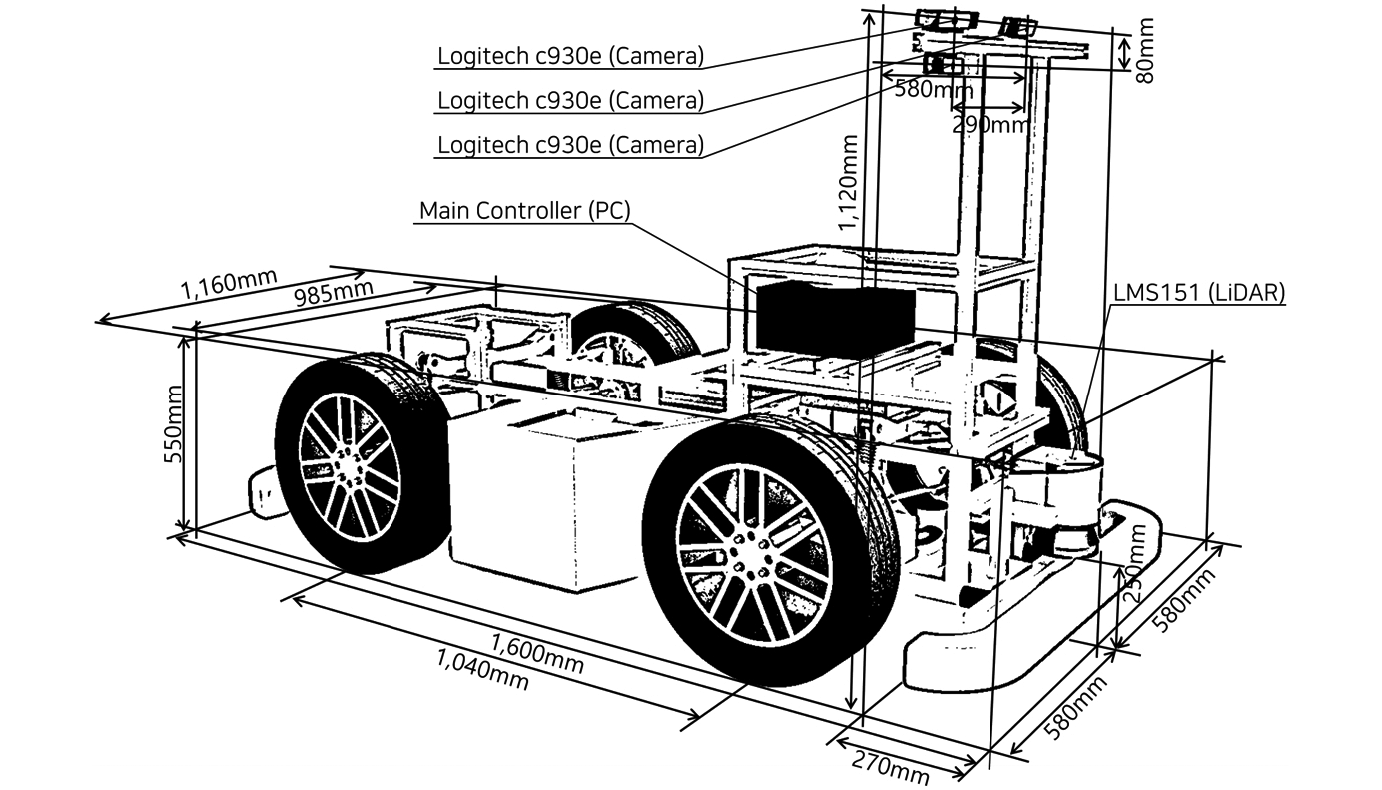
An Urban Autodriving Algorithm Based on a Sensor-Weighted Integration Field with Deep Learning
Electronics 2020
Deep Learning Based Steering Angle Correction System Using Vanishing Point for Autonomous Vehicle
SOItmC 2019

Adaptive Urban Auto-driving Algorithm based on Sensor Weighted Integration Field
The Fall Conference of Korea Automotive Safety Association 2019
Sparse Spatial CNN for Traffic Lane Recognition on Urban Road Environments
The Fall Conference of Korea Automotive Safety Association 2019
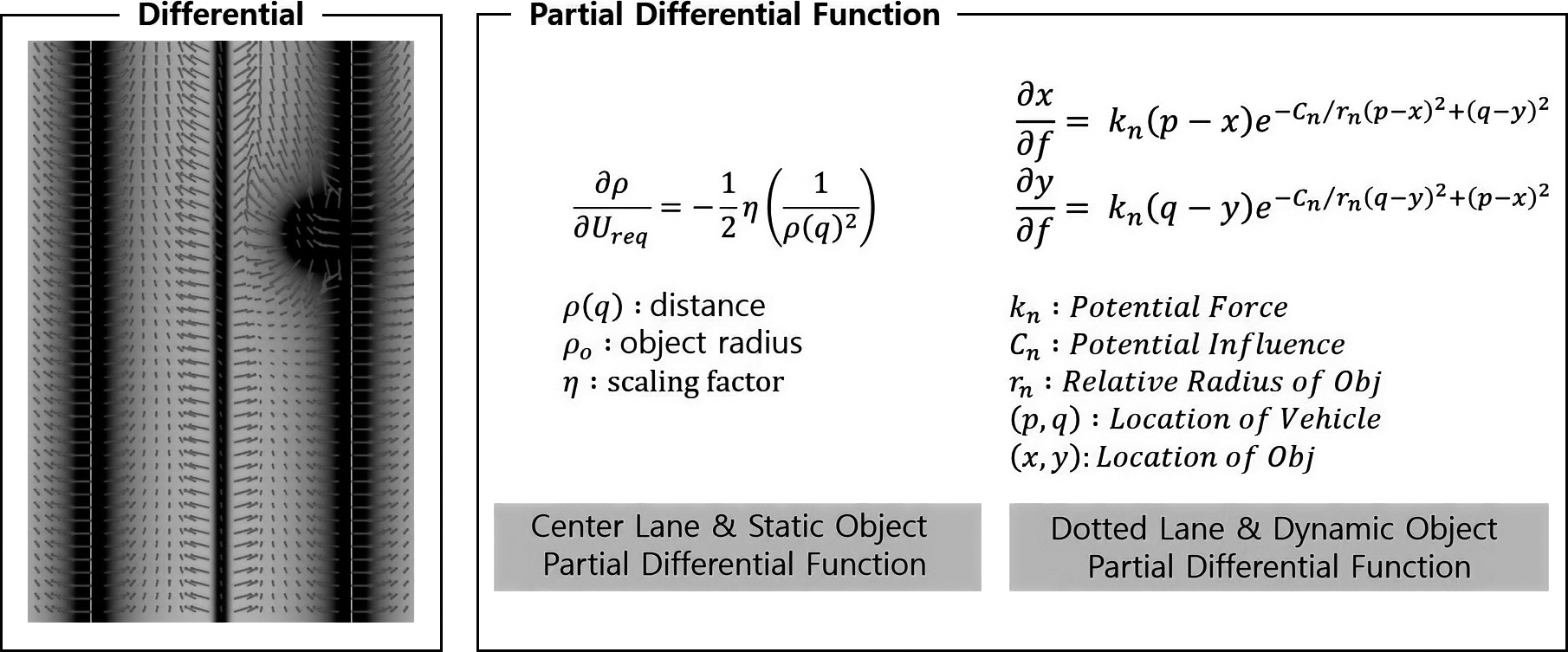
Development of Collision-Free Path Planning Algorithm Considering Moving Path of Dynamic Obstacles in Artificial Potential Field for Autonomous Vehicles
The Fall Conference of Korea Automotive Safety Association 2019
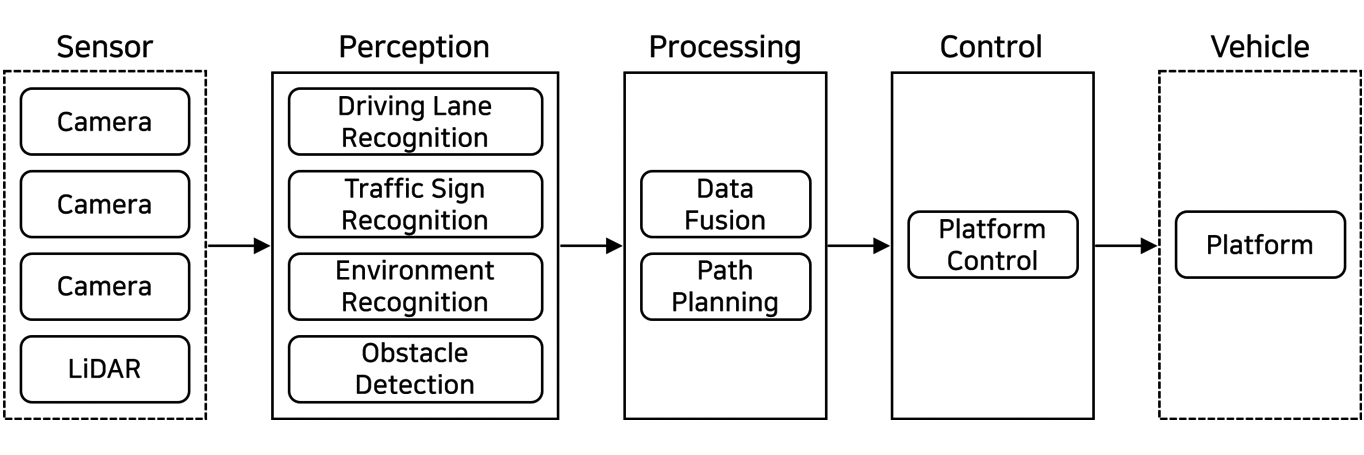
Improved Environment Recognition and Integrated Control Algorithms for Autonomous Vehicle
The Fall Conference of Korea Automotive Safety Association 2018
Radiance field implementation method and system using adaptive mapping function
KR Patent App. 10-2024-0044389, Apr 2024
Integrated trajectory estimation method and system based on generative model
KR Patent App. 10-2024-0037757, Mar 2024
Trajectory prediction method and system using a large language model
KR Patent App. 10-2024-0037756, Mar 2024

Pedestrian trajectory prediction apparatus
KR Patent No. 10-2591707, Mar 2024

Pedestrian trajectory prediction apparatus
KR Patent No. 10-2537381, May 2023
Pedestrian trajectory prediction method using trajectory descriptors representing actual walking patterns
KR Patent App. 10-2023-0027247, Feb 2023

Image convolutional method in hyperbolic space
KR Patent No. 10-2388760, Apr 2022
Pedestrian trajectory prediction method using grouping pedestrian
KR Patent App. 10-2022-0052202, Apr 2022
Pedestrian trajectory prediction method using non-probability sampling
KR Patent App. 10-2022-0032099, Mar 2022
Honors & Awards
Scholarship Funding
1st Place, RA Student Research Achievement Scholarship, AI Graduate School, GIST, Dec 2023.
Excellent Paper Award
International Workshop on Frontiers of Computer Vision (IW‑FCV 2023), Feb 2023.
Travel Scholarship Funding
AAAI‑23 student scholarship and volunteer program, Washington, DC, USA, Dec 2022.
Scholarship Funding
2nd Place, RA Student Research Achievement Scholarship, AI Graduate School, GIST, Dec 2022.
Qualcomm Innovation Fellowship
Finalist, 2022 Qualcomm Innovation Fellowship Korea, Qualcomm Technologies, Inc., Nov 2022.
Scholarship Funding
Overseas Internship Program Scholarship Funding, AI Graduate School, GIST, Sep 2022.
Samsung HumanTech Paper Award
Bronze Prize, 27th HumanTech Paper Award, Samsung Electronics Co., Ltd., Feb 2021.
Scholarship Funding
RA Student Academic Grade Scholarship, School of Electrical Engineering and Computer Science, GIST, Nov 2020.
DGIST Academic Symposium
Excellence Prize, Oral Presentation Session, The 1st Convergence University Academic Symposium, Sep 2019.
International Autonomous Driving Competition
Bronze Prize, Competition on Korea Autonomous driving experiment city (K-City), Korea Transportation Safety Authority, Sep 2019.
Bachelor Thesis Award
First Prize, Best Bachelor Thesis Award, Part of Undergraduate Group Research Curriculum at DGIST, Jan 2019.
International Autonomous Driving Competition
Bronze Prize, Competition on Korea Autonomous driving experiment city (K-City), Korea Transportation Safety Authority, May 2018.
Autonomous Vehicle Technical Report
First Prize, International Student Green Car Competition, Korea Transportation Safety Authority & Korea Auto-Vehicle Safety Association, May 2018.
World Friends ICT Volunteer
Education service of programming language (Python), Photoshop, and Video Editing, Volunteered in Can Tho University (CTU), Vietnam, Jul 2016 – Aug 2016.
Talks
Under Construction... Coming Soon!
Contact
Location:
GIST, Electrical Engineering and Computer Science Building C, Room 412
123, Cheomdangwagi-ro, Buk-gu, Gwangju, Republic of Korea
Email:
inhwanbae (at) gm.gist.ac.kr